Consignes
Vous allez programmer les déplacements du robot Maqueen.
Travail à faire :
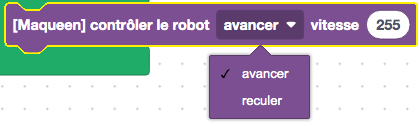
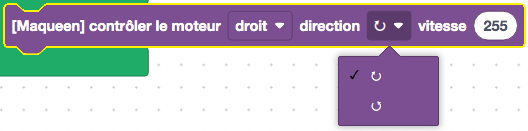
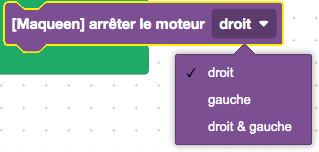
- lire les informations concernant les blocs spécifiques des moteurs ci-dessous,
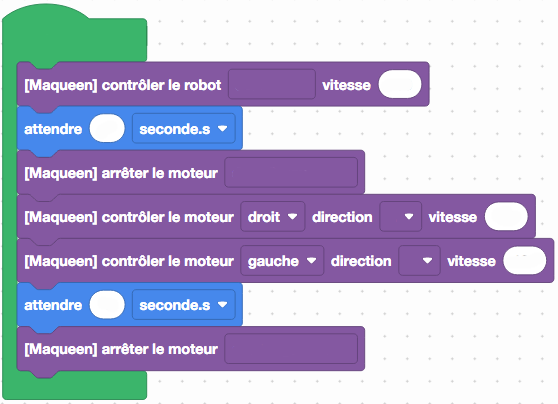
- reconstituer le programme en utilisant les blocs donnés dans l'interface en bas de cette page,
- tester le programme su le simulateur (
 ),
), - téléverser le programme dans la carte.
Voici l'algorithme de votre robot :
- Le robot avance d'un mètre.
- Il pivote de 180 degrés
- Le robot s'arrête.