Bonjour, nous nous appelons Clara et Melissa et nous avons 14 ans.
Nous faisons partis de l’atelier technologie. Cet atelier consiste à venir le mardi et le jeudi entre 13h et 14h toute les semaines. Nous avons commencé par modéliser des petite pièces en 3D ( porte-clés,…) pour nous familiariser avec le site ( Tinkercad ) ; puis nous avons commencé par dessiner nos pièces puis les modéliser. L’ épreuve du robot sumo consiste à combattre d’autre robots sumos appartenant à d’autre groupe.
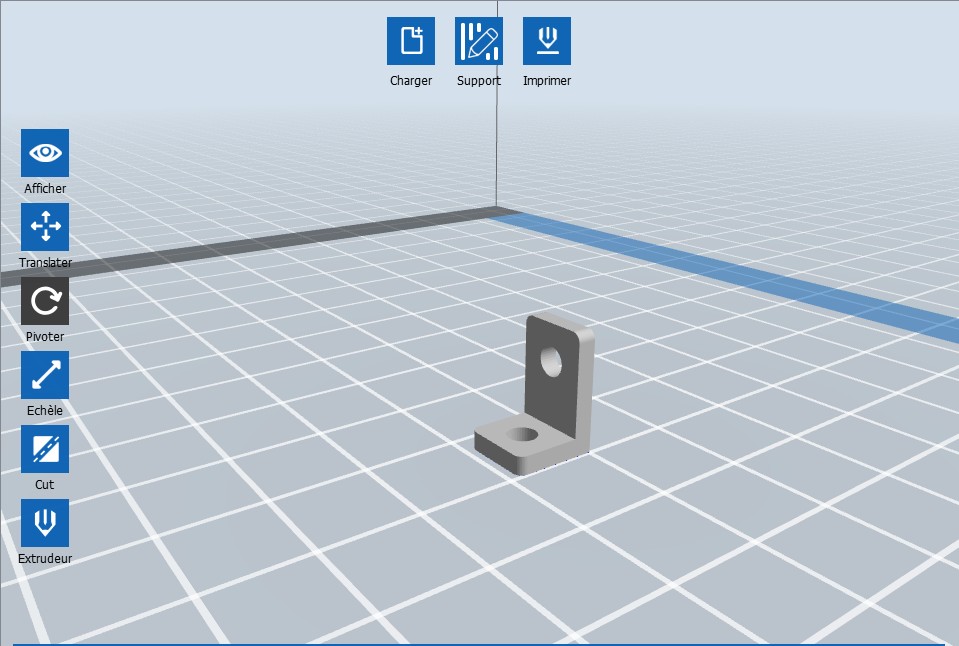
Sur notre robot nous avons installé un capteur infrarouge que nous avons installé grâce à un support que nous avons imprimé à l’aide de l’imprimante 3D.
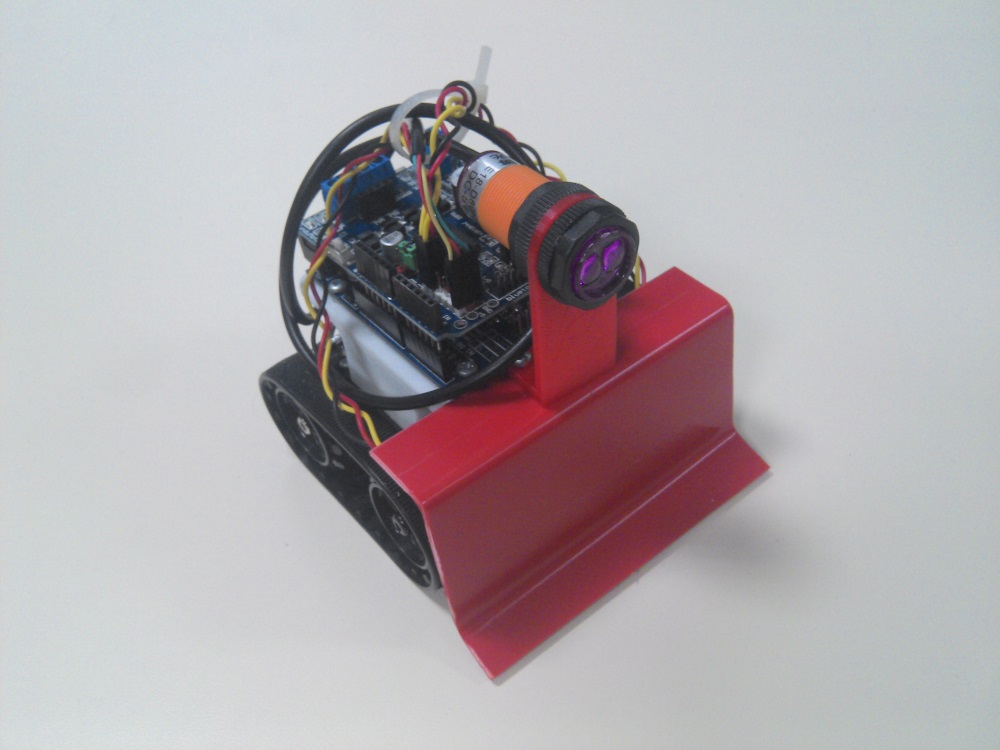
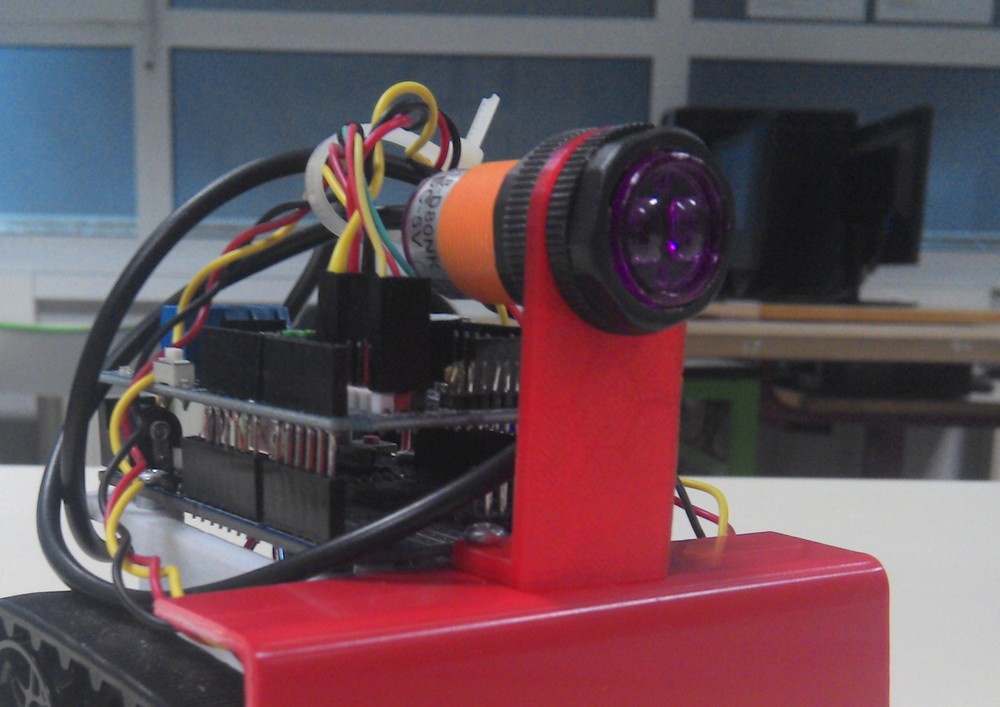
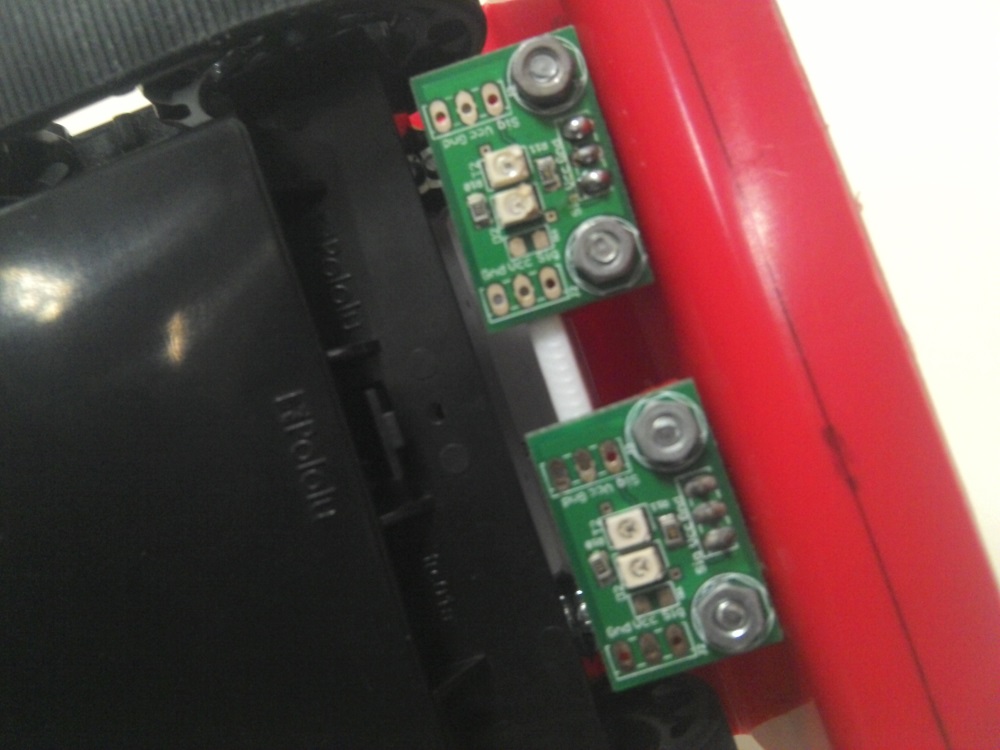
Ce premier capteur infrarouge sert à détecter s’il y a un obstacle. Nous avons aussi installé 2 capteurs infrarouge que nous avons placé en bas et sur l’avant du robot. Pour les fixer, nous avons imprimé des sortes de minis équerres en 3D pour pouvoir les faire tenir. Ces deux capteurs infrarouge servent à capter les délimitations noires du dojo.
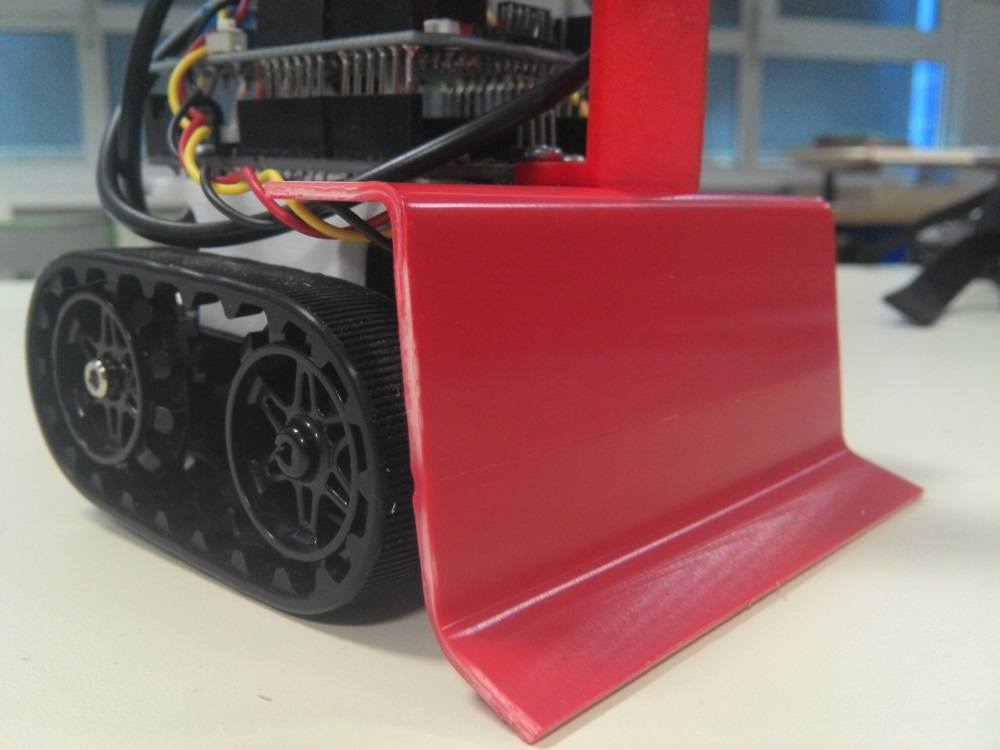
Pour pouvoir sortir le robot adverse de la plateforme, nous avons travaillé sur une plaque en PVC que nous avons coupée avec une cisaille guillotine. Nous l’avons ensuite plié avec une thermoplieuse .
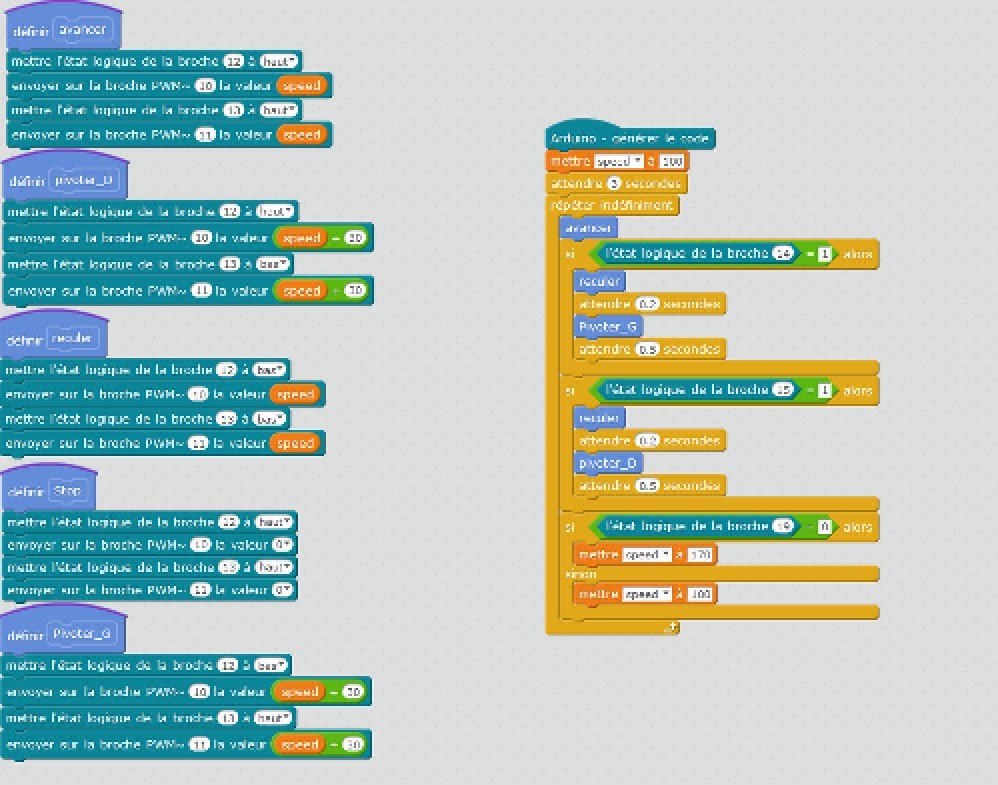
Pour finir, nous avons créé des programmes pour que le robot puisse se piloter automatiquement.