Bonjour nous sommes Maelys Chabourel et Margot Fabre nous sommes en classe de 4ème .
Nous avons réalisé un robot sumo. Le but ? Faire sortir le robot adverse de la piste ronde.
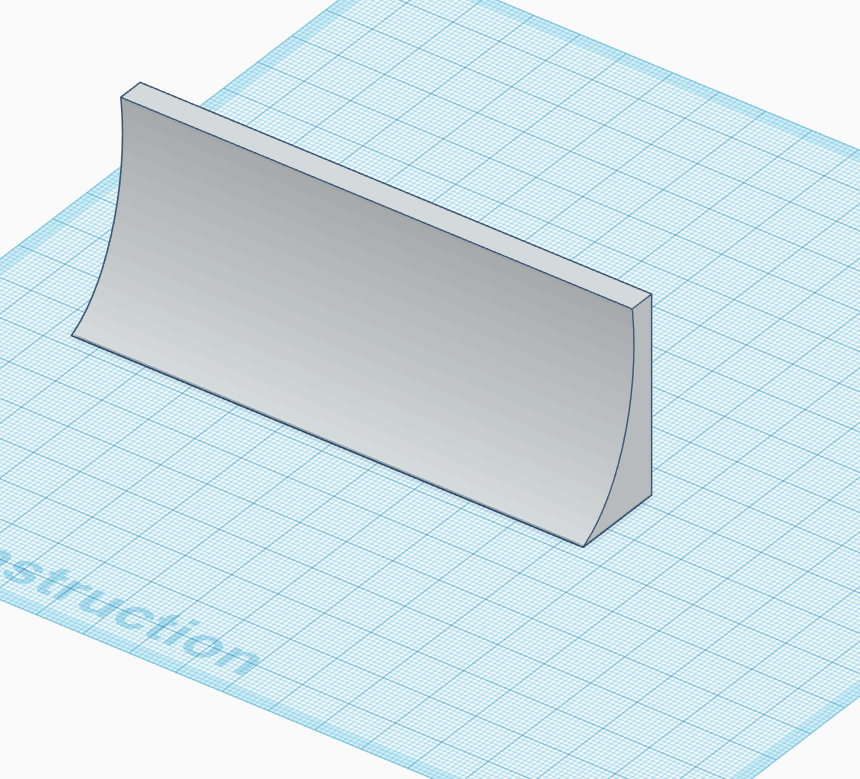
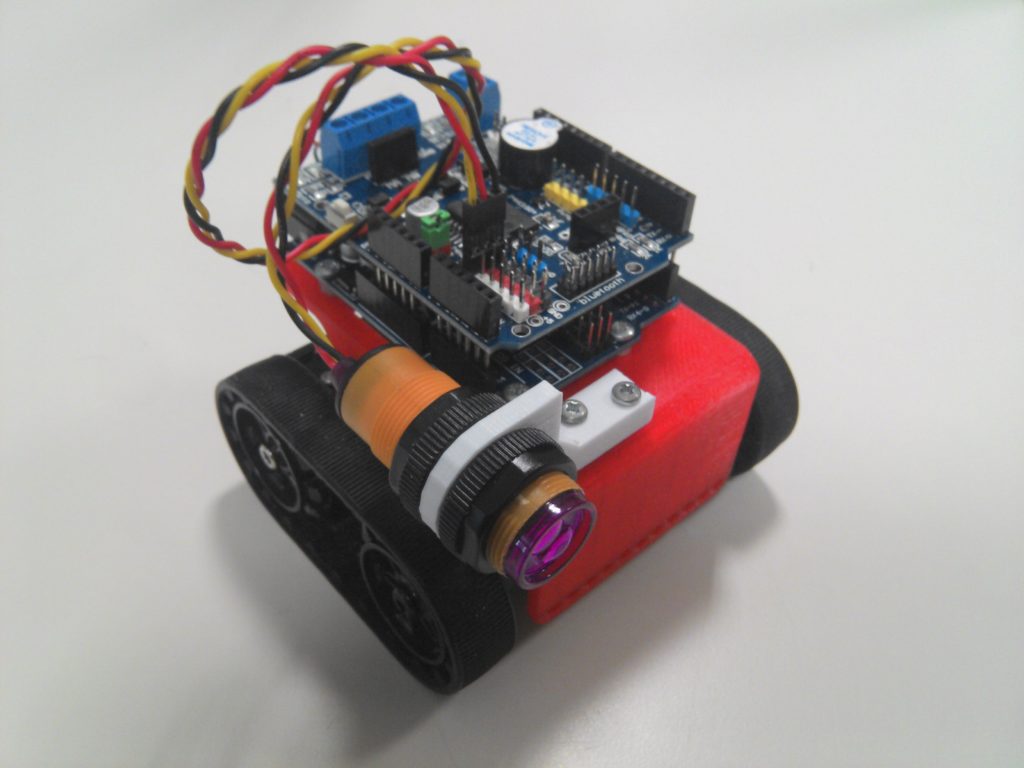
Pour cela, nous avons conçu différentes pièces à l’aide d’un logiciel de modélisation 3D : Tinkercad. Par exemple, nous avons modélisé un pare-choc pour protéger et cacher les capteurs chargés de détecter la ligne noire de la piste.
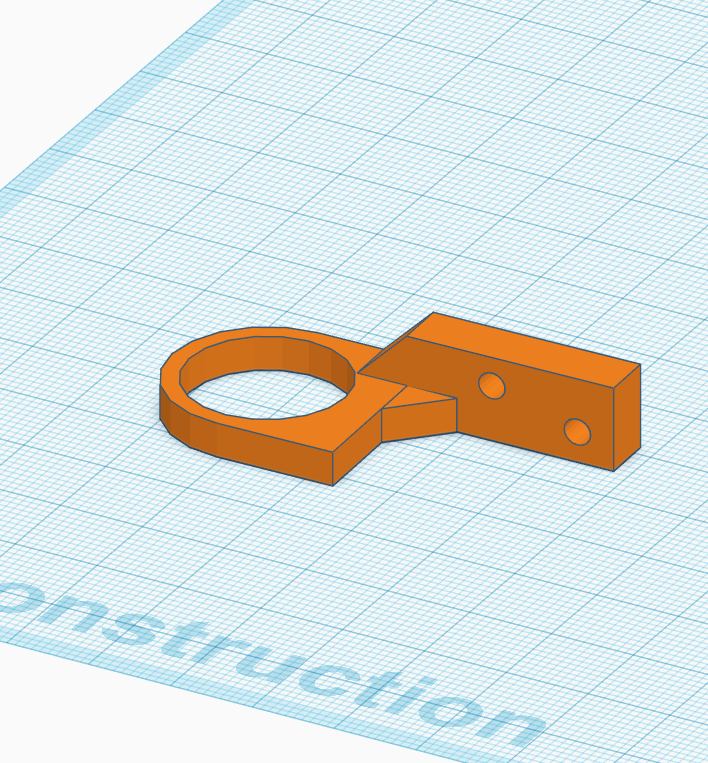
Nous avons aussi modélisé un support pour le capteur infrarouge destiné à détecter le robot adverse.
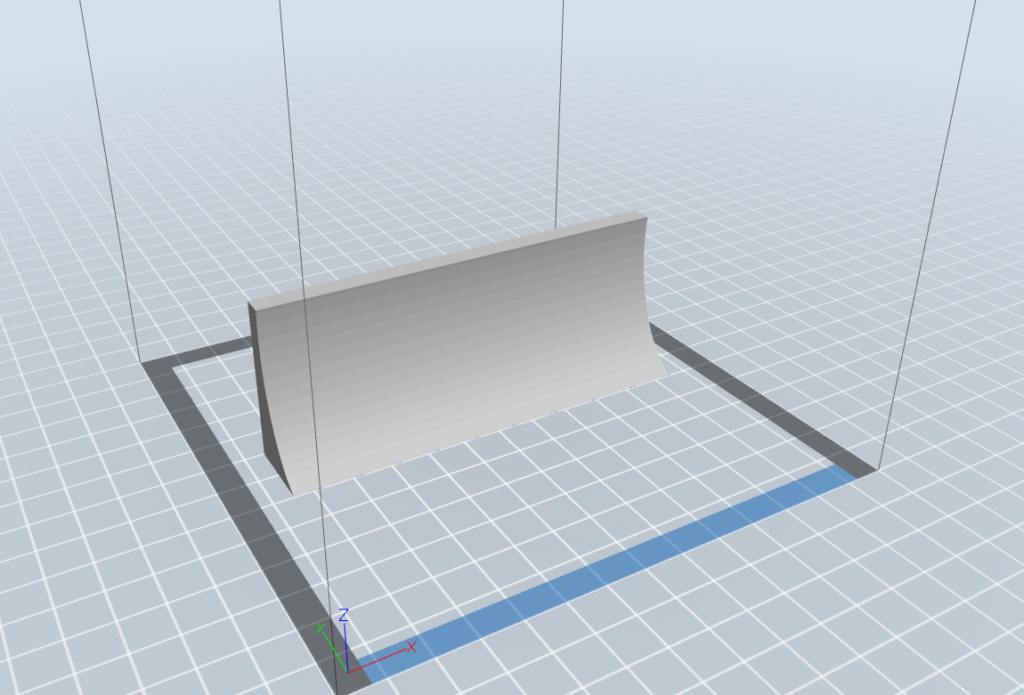
Avant d’imprimer, nous avons utilisé le logiciel Flashprint pour faire des réglages sur le fichier (remplissage et supports).
Une fois les pièces imprimées, commence le montage.
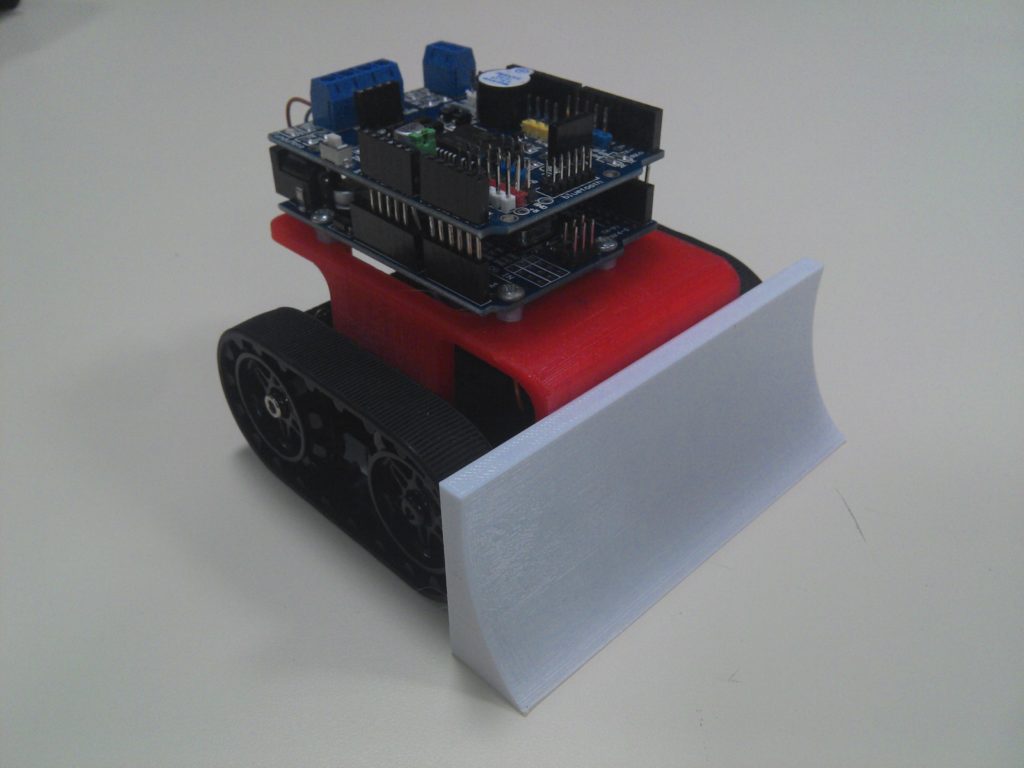

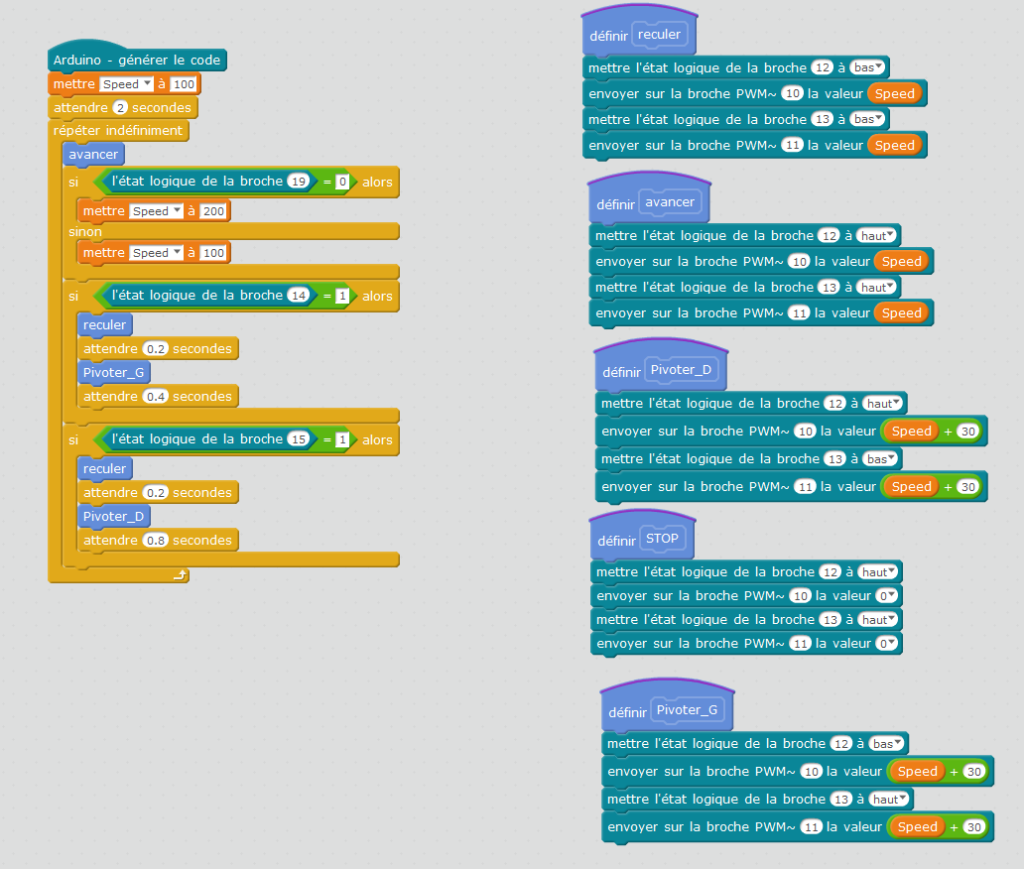
Enfin, lorsque le robot a été entièrement assemblé, nous avons créé le programme pour le rendre autonome avec le logiciel MBlock qui nous a permis de programmer facilement avec des blocs graphiques.
Après quelques essais concluants contre les robots du professeur, nous avons participé à une petite compétition contre les autres groupes d’élèves de l’atelier.