Bonjour, nous sommes Axelle Dutreuil, Perrine Lacaze, Basile Navarri et Marilou Masson. Nous sommes en 4ème.
Nous avons construit un robot à l’atelier Fablab qui se déroule entre 13h et 14h le mardi et le jeudi.
Nous l’avons nommé Edgar BAMP ( Basile, Axelle, Marilou et Perrine ).
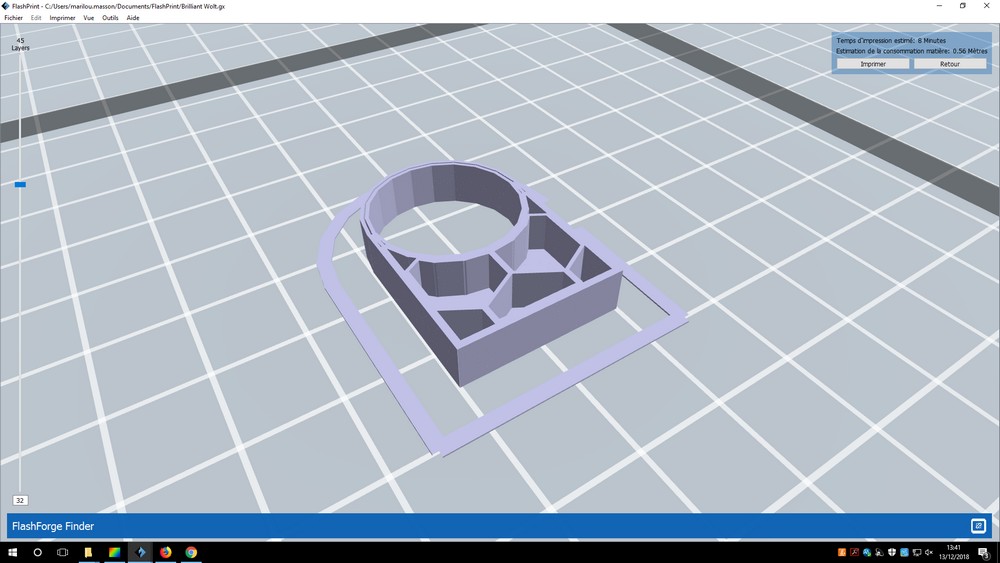
Nous nous sommes servis de Tinkercad pour modéliser des pièces et pour ensuite les imprimer grâce a une imprimante 3D ( FlashForge ).
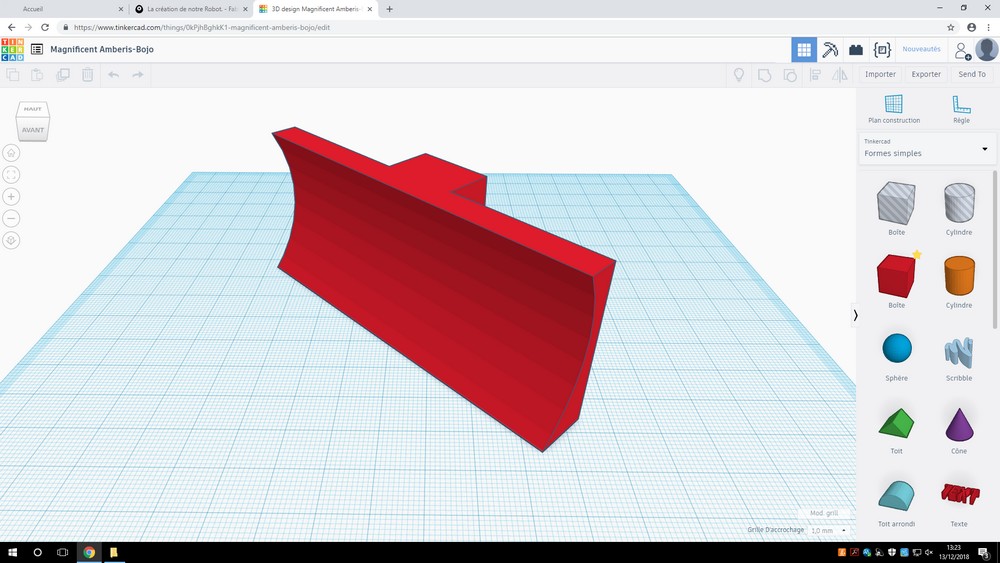
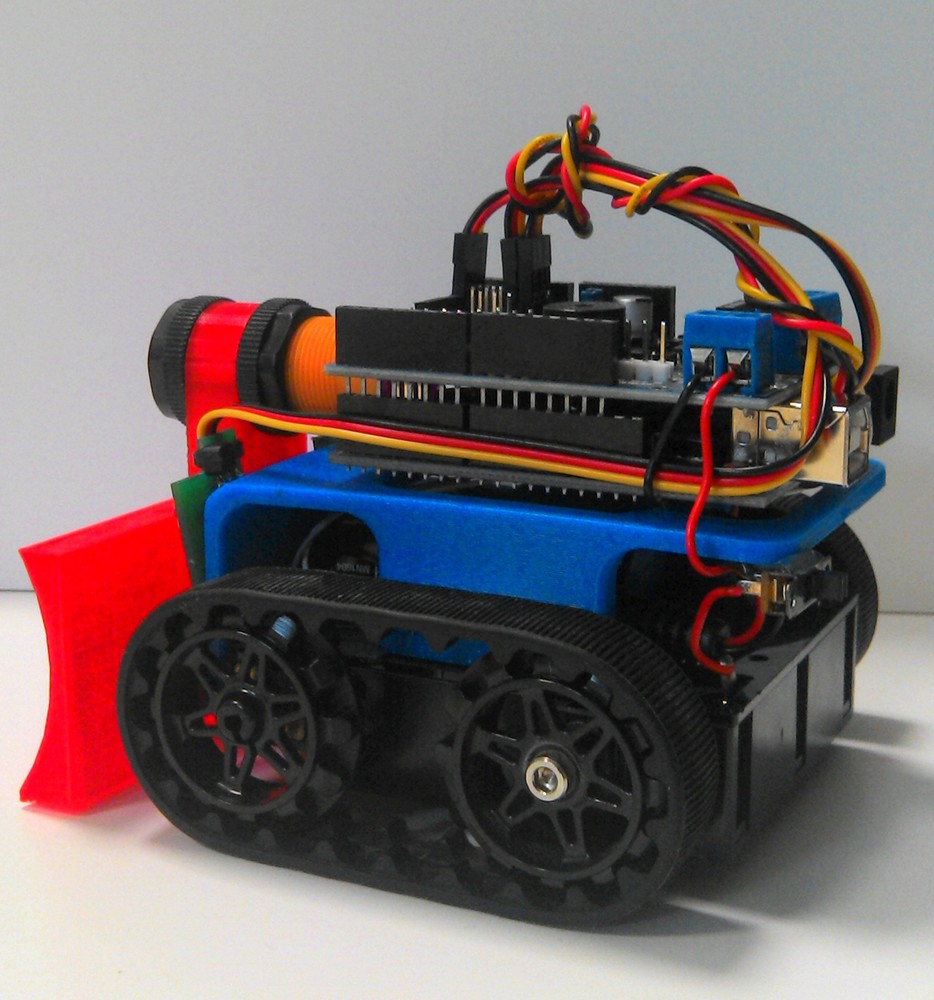
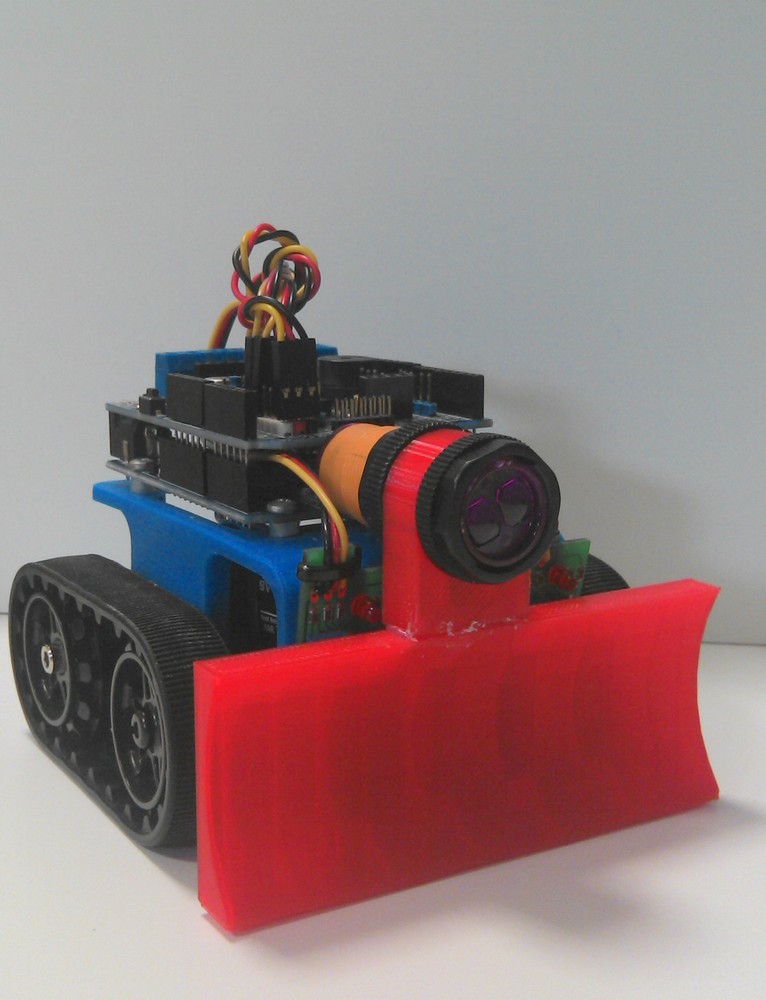
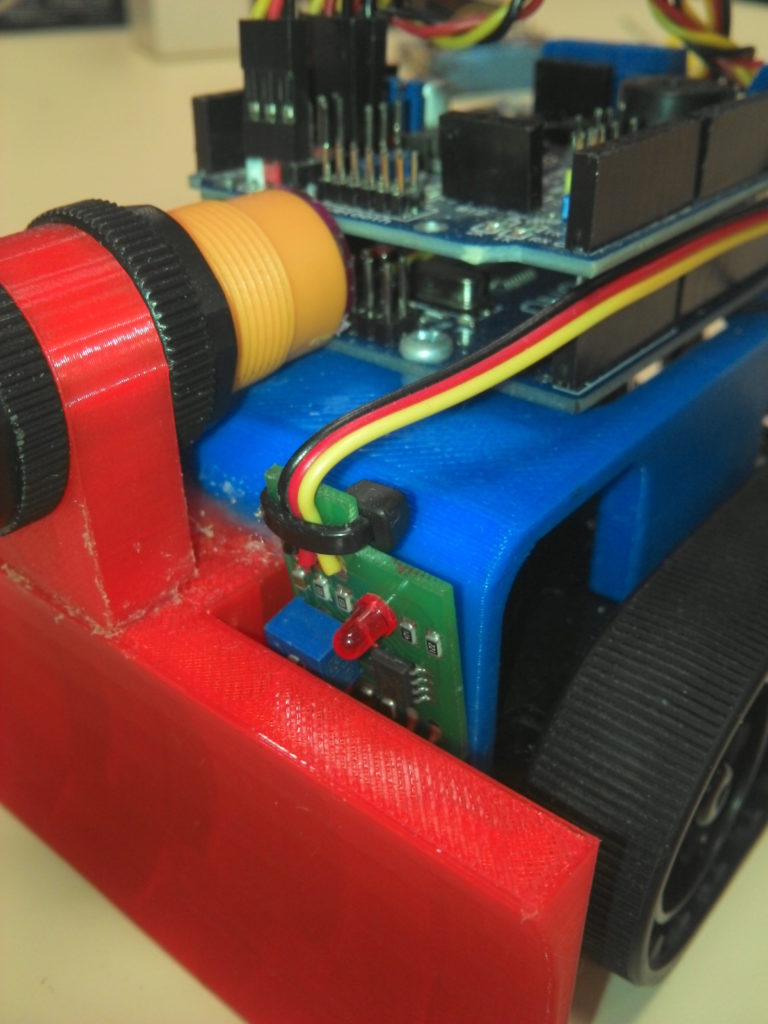
Nous avons imprimé un pare-choc pour protéger notre robot et pour soulever les adversaires de notre robot.
Nous avons aussi imprimés un support pour un capteur infrarouge que nous utilisons pour détecter l’adversaire.
Une fois les pièces imprimées et fixées sur le robot, nous avons placés trois capteurs infrarouges à l’avant du robot.
Deux qui détectent le blanc ou le noir :
– s’ils détectent du blanc, le robot avance tout droit mais dès qu’ils détectent du noir, le robot tourne à gauche ou à droite.
Un qui détecte un obstacle ou un adversaire :
– s’il détecte un obstacle ou un adversaire, le robot accélère deux fois plus que ça vitesse normale sur l’obstacle détecté.
Pour que le robot fonctionne en autonomie, nous l’avons programmé avec le logiciel Mblock.