Les élèves de 3e ont achevé leur projet de convoyage et de stockage automatisés de conteneurs.
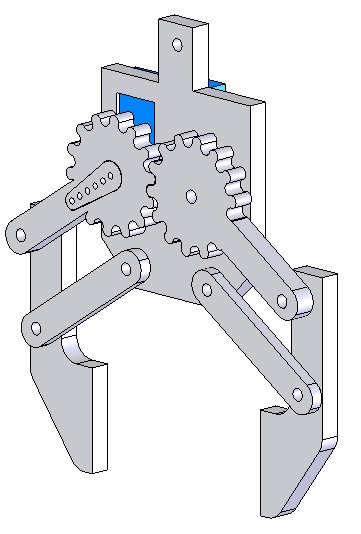
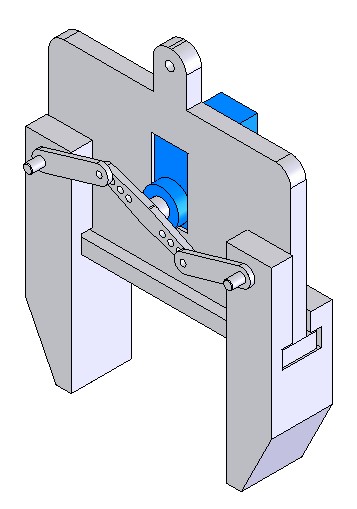
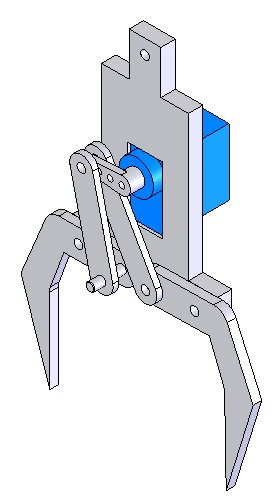
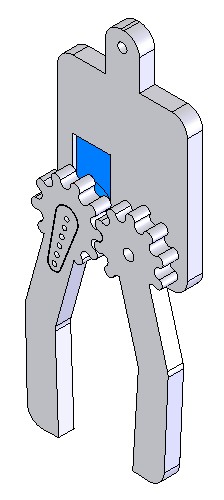
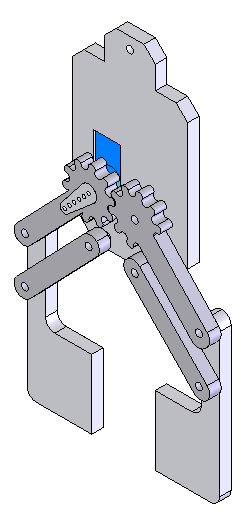
Après quelques recherches, les élèves se sont penchés sur la modélisation en 3D d'une solution technique pour saisir le conteneur puis, après en avoir simulé le fonctionnement, ils ont commencé l'usinage ou l'impression 3D des différentes pièces.
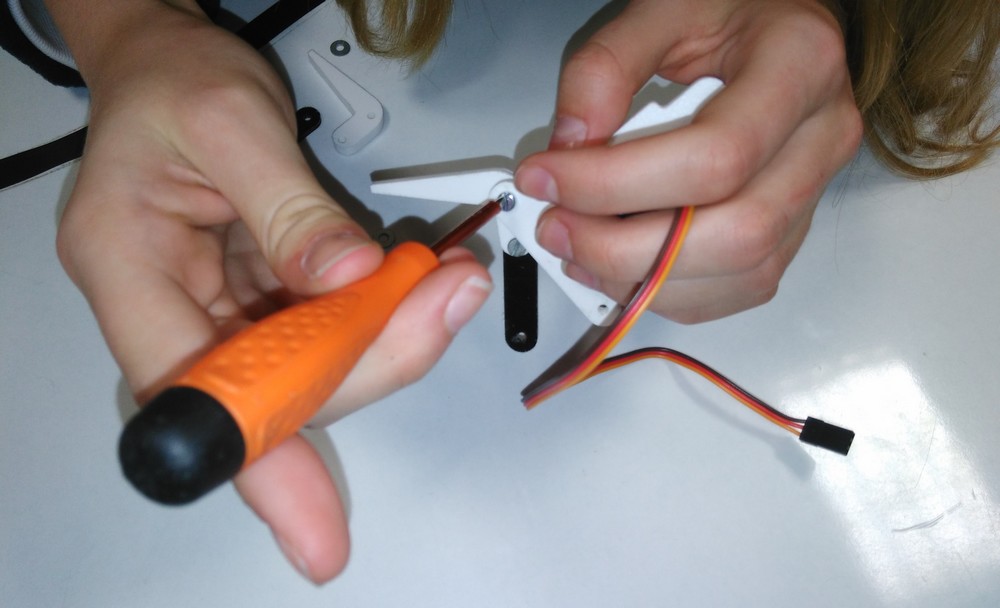


L'assemblage terminé, ils ont pu monter leurs pinces sur le bras manipulateur fabriqué par leur professeur et entamer la programmation de ses déplacements afin de saisir et déposer le conteneur.
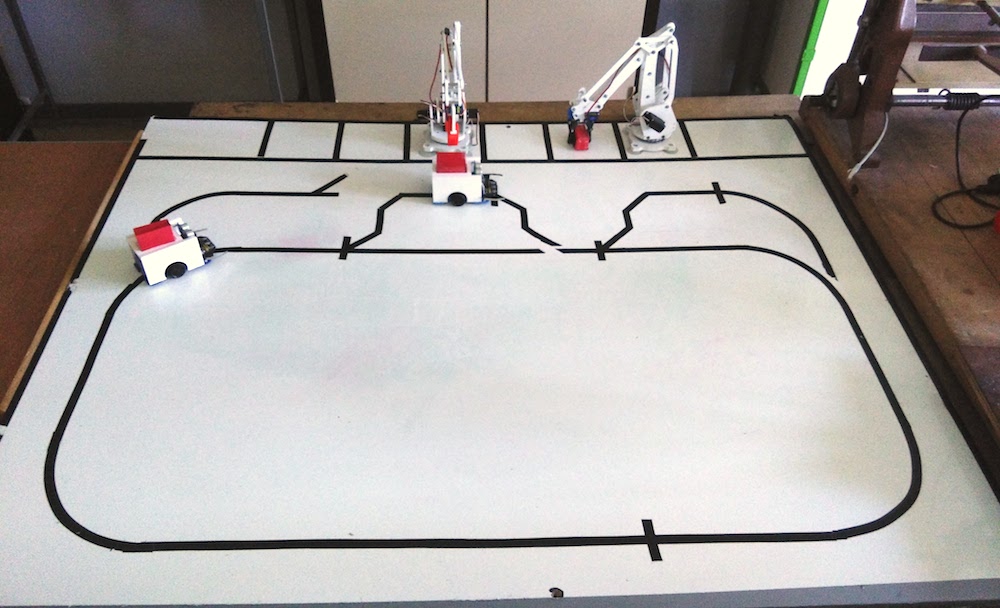
En parallèle, les élèves se sont lancés dans la programmation du robot convoyeur. Sa mission étant de transporter un conteneur de la zone de chargement à la zone de stockage de façon précise, les élèves ont utilisé un marquage au sol et une programmation assez complexe qui permet au robot de compter le nombre d'intersections et de sortir dans la bonne zone de déchargement.
Voici une vidéo qui synthétise l'ensemble du projet.
Des photos des pinces réalisées par les élèves sont visibles dans la galerie. Vous pourrez admirer la qualité de leur travail de conception et de fabrication.
M. Soulard