Manny
Titouan Joly on 26/11/2018 13:17
Avez-vous déjà imaginé pouvoir intégralement construire un robot ? Avant de participer à l'atelier robotique, nous non plus.Nous sommes quatre et nous nous appelons :
Lucas Cloutet
Enzo Chabot
Titouan Joly
Jean Bonavero.
Depuis le mois de septembre, nous travaillons ensemble sur une épreuve proposée par l'organisateur de l'atelier : Monsieur Soulard notre profeseur de technologie.Cette épreuve nommée ''sumo'' consiste en l'imagination, la modélisation et la programmation d'un robot capable de pousser un autre robot en dehors d'une piste circulaire qui mesure un mètre de diamètre. Ces derniers ne doivent pas dépasser la taille 12,5cm sur 12,5cm.Aux thermes de la création, nous devrons affronter d'autres groupes d'élèves.
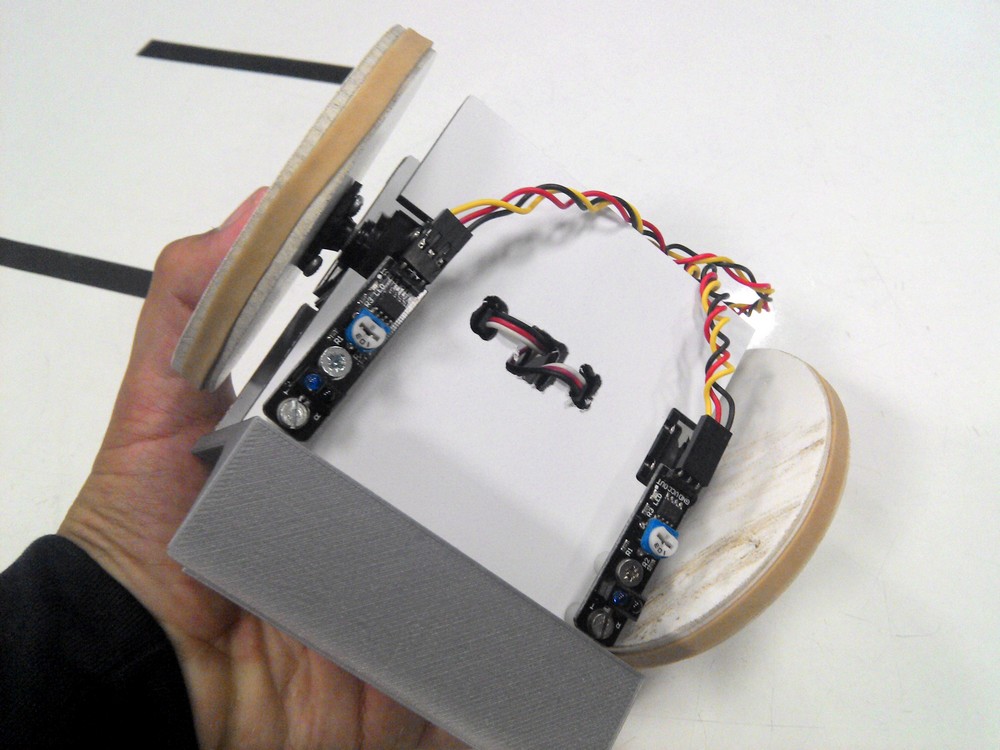
Après nous avoir expliqué l'épreuve, notre professeur nous a fourni les composants dont nous avions besoin pour cette épreuve :deux servo-moteurs capables d'entraîner les roues de notre machine;
des roues de toutes largeurs et de tous diamètres;
deux détecteurs de lignes
un capteur infra-rouge pouvant détecter d'éventuelles attaques frontales;
et enfin la carte arduino, véritable cerveau de notre future machine.
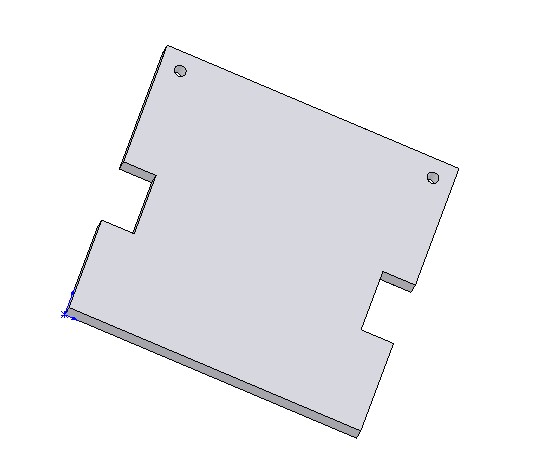
Après de nombreuses réflexions, nous avons décidé de faire un robot d'une simplicité enfantine; Il sera composé d'un châssis sur lequel nous placerons les composants, deux roues seront disposées de part et d'autre du châssis qui sera surmonté d'un rectangle similaire; enfin, devant lui, se dressera un pare-choc semblable à celui d'un chasse-neige.
Voici le châssis en question :
Les plans du sumo terminés, nous avons du modéliser en trois dimensions toutes ses pièces pour ensuite les assembler virtuellement afin de vérifier qu'il n'y aurait pas de problème lors du montage.
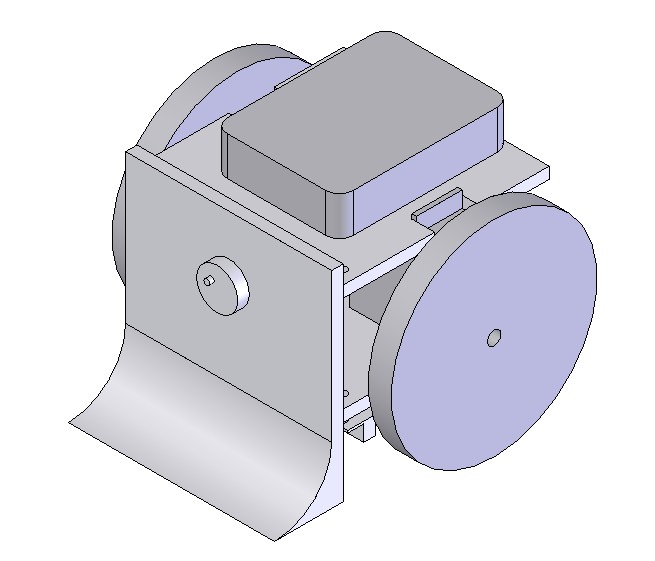
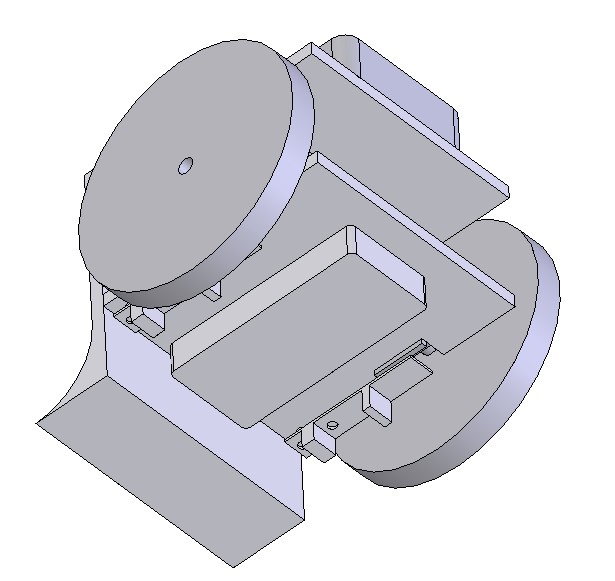
Pièce par pièce, heure par heure, nous avons vu apparaître notre robot sous nos yeux grâce à SolidWorks un logiciel de modélisation créé par .
En voilà la maquette en trois dimensions :
La modélisation terminée, nous avons pu créer les pièces grâce à différents outils: une fraiseuse pour les pièces plates (châssis, roues,etc.), l'imprimante 3D pour le pare-choc et une foreuse pour trouer certaines plaques.
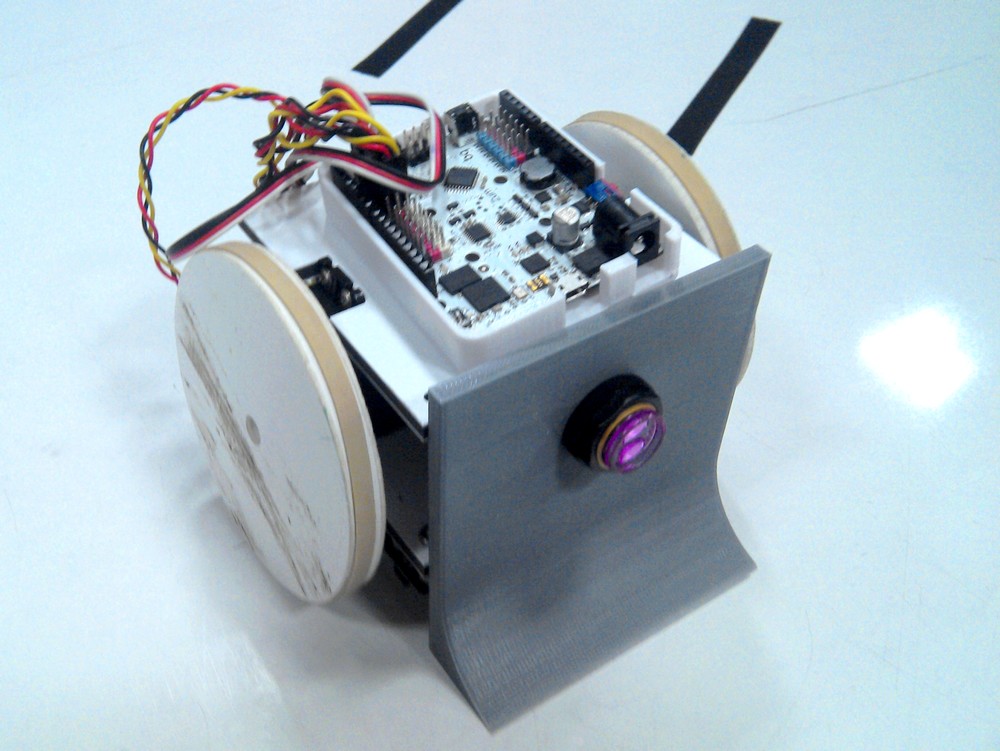
Monter le robot a été très agréable car nous nous rendions compte pour la première fois de tout le travail que nous avions fourni depuis maintenant deux mois et demi.
Nous sommes fiers de vous présenter un robot peu esthétique mais très efficace, :
Il a ensuite fallu que nous créions un algorithme que le robot devra effectuer lors des combats. Il fallait qu'il soit efficace mais simple pour ne pas nécessiter trop de travail.
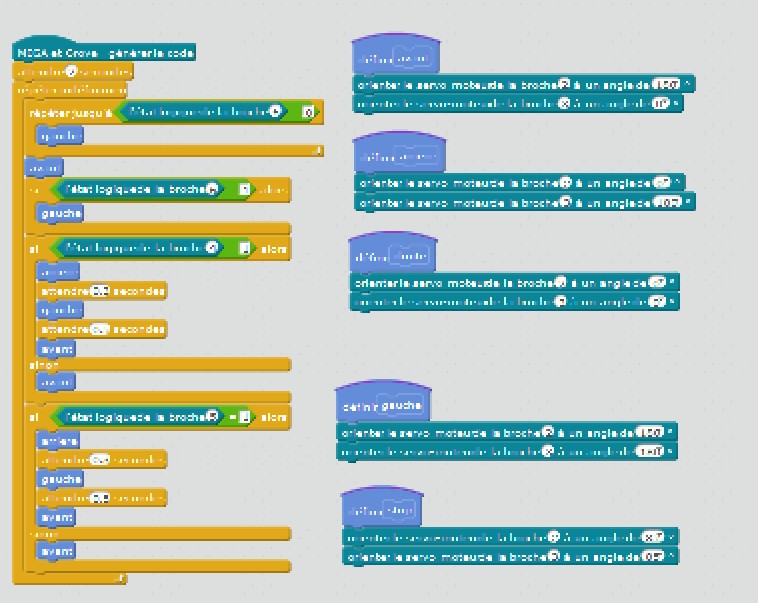
Notre algorithme est simple. Notre robot avance jusqu'à rencontrer une ligne noire (le bord de la piste) repérée par les détecteurs de lignes. Quand c'est le cas, il recule, se retourne, puis avance.